
China will launch it's third unmanned lunar probe very early in December. Plans for Chang'e 3 include the first soft landing on the Moon since 1976 and the first rover since 1973. The China National Space Agency (CNSA) has long reported the target for this historic mission is Sinus Iridum, "the Bay of Rainbows," on the northwestern frontier of Mare Imbrium.
Meanwhile, following five years of planning, the NASA orbiter LADEE has begun a 100 day examination of the Moon's tenuous exosphere, its formal science mission, in low equatorial orbit. It's all but certain both missions will be underway at the same time, leading some to jump to conclusions in reporting the two missions will interfere with one another. But, as Dr. Paul Spudis of the Lunar and Planetary Institute reports, nothing could be further from truth. Read his assessment, HERE.
-
Meanwhile, following five years of planning, the NASA orbiter LADEE has begun a 100 day examination of the Moon's tenuous exosphere, its formal science mission, in low equatorial orbit. It's all but certain both missions will be underway at the same time, leading some to jump to conclusions in reporting the two missions will interfere with one another. But, as Dr. Paul Spudis of the Lunar and Planetary Institute reports, nothing could be further from truth. Read his assessment, HERE.
-
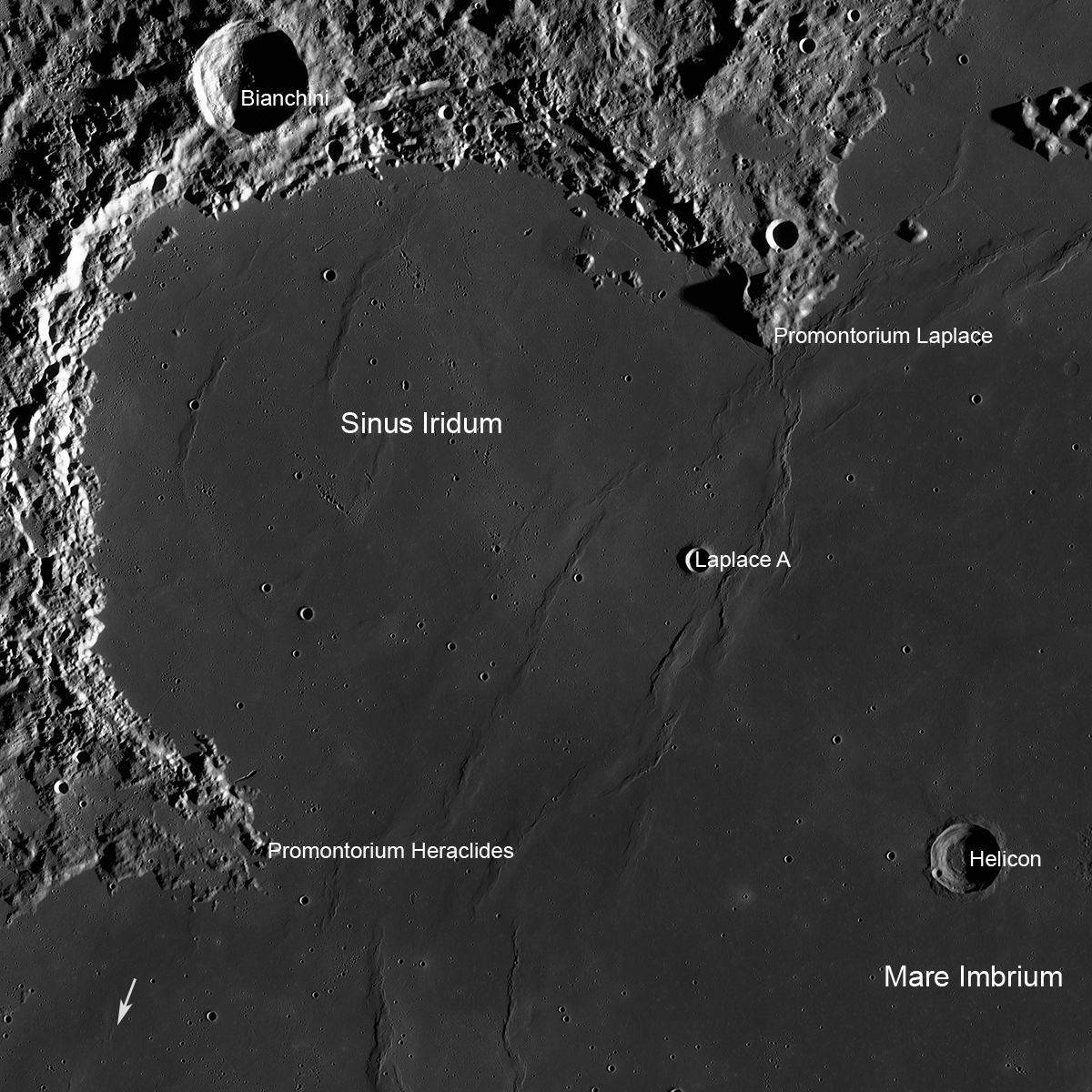 |
| Sinus Iridum - it is likely China will land a rover near Laplace A before the end of 2013. (Arrow shows location of the Soviet Lunokhod 1), LROC Wide Angle Camera mosaic field of view 360 km [NASA/GSFC/Arizona State University]. |

Principal Investigator
Lunar Reconnaissance Orbiter Camera (LROC)
Arizona State University
In the near future China will attempt a robotic landing on the Moon, and will deploy a rover. The launch date and landing dates have not been officially announced. The exact landing spot is also not yet publicly designated, but it seems likely the landing will take place in Sinus Iridum, possibly near the fresh crater Laplace A (8 km diameter).
Why this particular spot on the Moon? Likely there are critical engineering constraints in terms of landing site selection as well as important science goals. And there is the dramatic grandeur of the lunar landscape!
Imagine the first rover-eye view from the crater rim - a sheer drop of 1600 meters at your wheels, and an 8 km view across to the far wall! From LROC NAC images we know rock is exposed in the upper walls and dramatic landslides streamed material down to the crater floor. Speaking of the crater floor - it hosts a now frozen lake of impact melt 2500 meters (1.5 miles) in diameter. Imagine the moments after the crater formed, the floor was a cauldron of molten rock with debris sliding down into the melt, and the crater itself was deforming as the floor uplifted after the initial pressure of the impact was relieved.
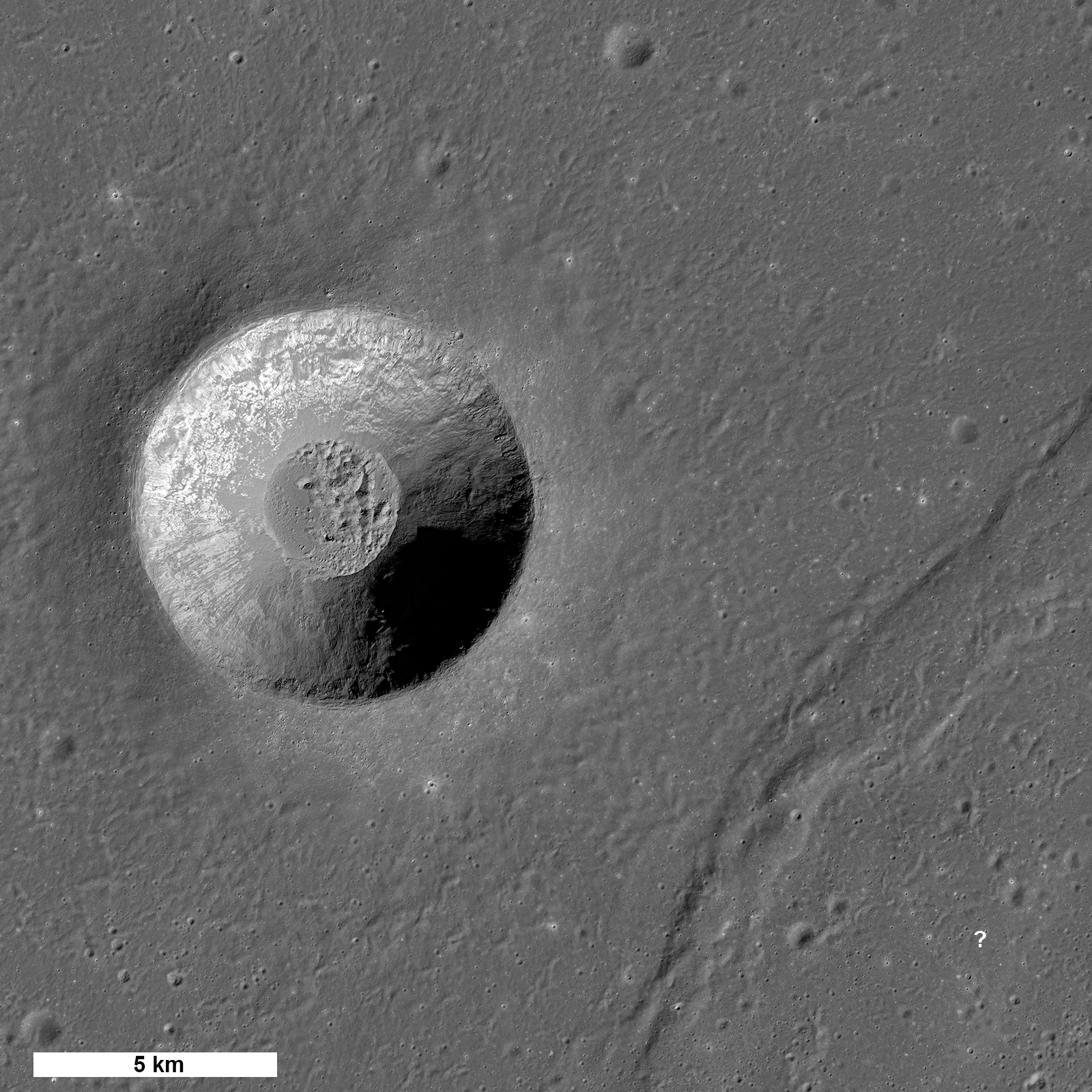 |
| Laplace A crater and nearby wrinkle ridge (diagonally across at lower right). The question mark shows a potential landing site from which the rover could traverse northwest across the ridge to the edge of the crater [NASA/GSFC/Arizona State University]. |
Some of the many outstanding questions regarding the nature of the mare basalts include: how thick are individual flows, does the composition of the erupted magma change with time and location, and are pyroclastic (explosive) eruptions intermingled with effusive eruptions? These questions can be directly addressed with the Chang'e 3 rover! No humans or robots have ever visited a fresh crater anywhere near this size on the Moon (or Mars for that matter) so the return from this mission has great potential for advancing our knowledge of the Moon.
| LROC NAC view of the interior of Laplace A crater [NASA/GSFC/Arizona State University]. |
Another key question can be addressed: what is the 3D nature of large contractional ridges on the Moon? The rover is thought to have a ground penetrating radar (GPR) and it just so happens that a large wrinkle ridge (a contractional landform) lies about 10 km east of Laplace A. Although the exact mission plan is not publicly available, one potential scenario is that the lander sets down just east of the wrinkle ridge and deploys the rover. After initial testing of the lander and rover, and geologic characterization of the landing site, the rover could set off to the west towards the crater. As the rover drives up and over the wrinkle ridge the GPR would continuously probe the subsurface, slowly building up a 3D profile down to 100 meters or more (?) beneath the surface. Wrinkle ridges are complex landforms created when mare basalts are compressed, causing them to buckle and break along faults. However, wrinkle ridges have not been fully explored, and the geometry and number of faults associated with each wrinkle ridge is not known. A subsurface profile of a wrinkle ridge could tell us the number of faults, where the faults are located, and how steeply the faults dip: is it 15°, 30° or 45°?
 |
| Laplace A as plotted using photography and digital terrain model gathered from the CNSA orbiter Chang'e 2 [CNSA/CLEP]. |
 |
| Full resolution segment of the west wall and rim of Laplace A by Chang'e 2 [CNSA/CLEP]. |
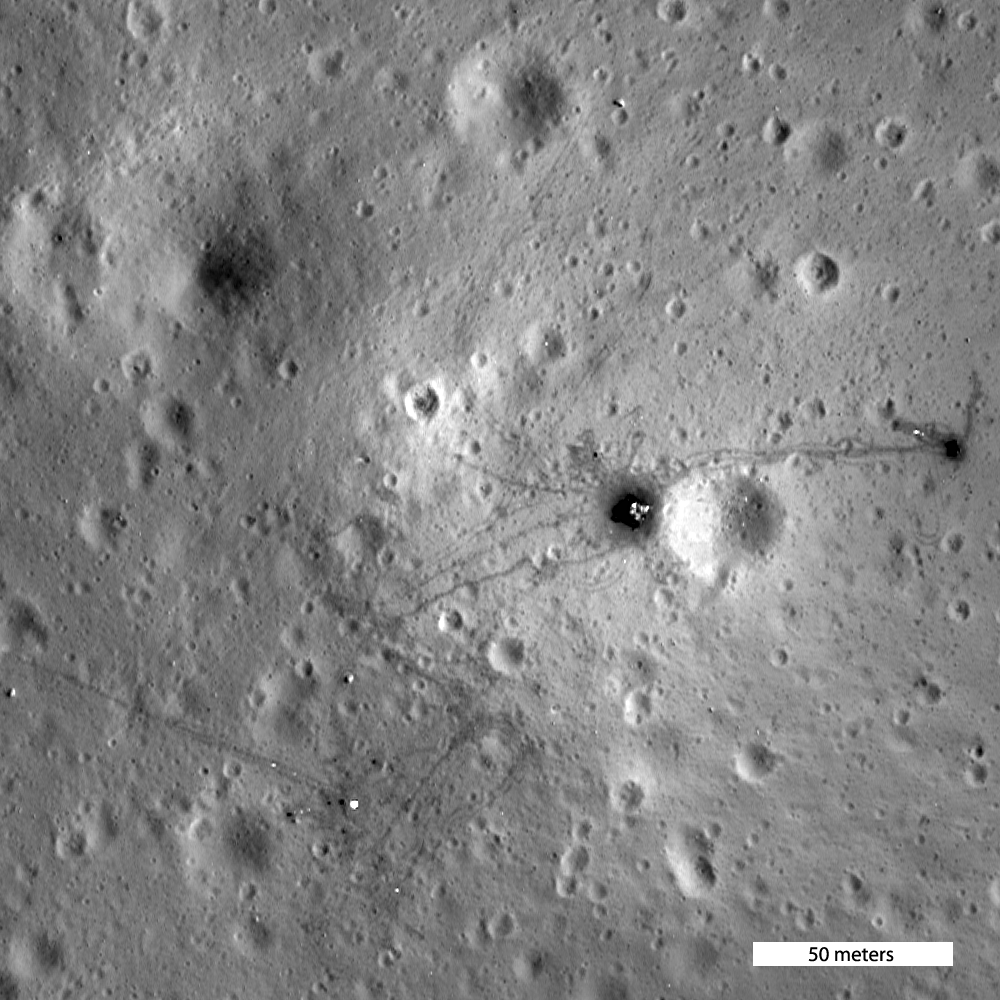
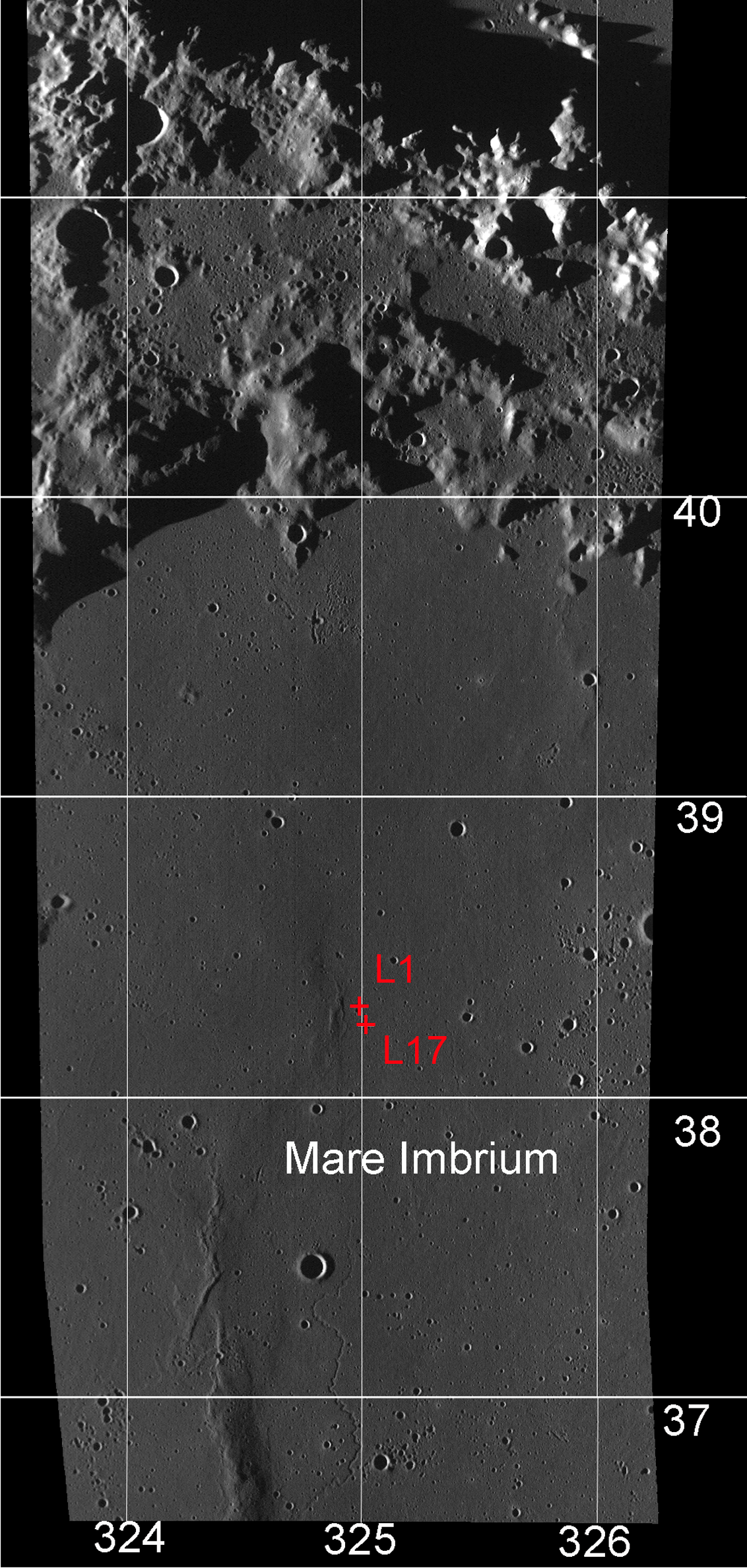
Coincidentally, Lunokhod 1 landed only 250 km to the southwest of Laplace A over forty years ago (17 November 1970). This intrepid Soviet rover explored for almost a year and traveled a total distance of 10.5 km. Both the lander vehicle (Luna 17) and the rover can be seen on the surface today.
 |
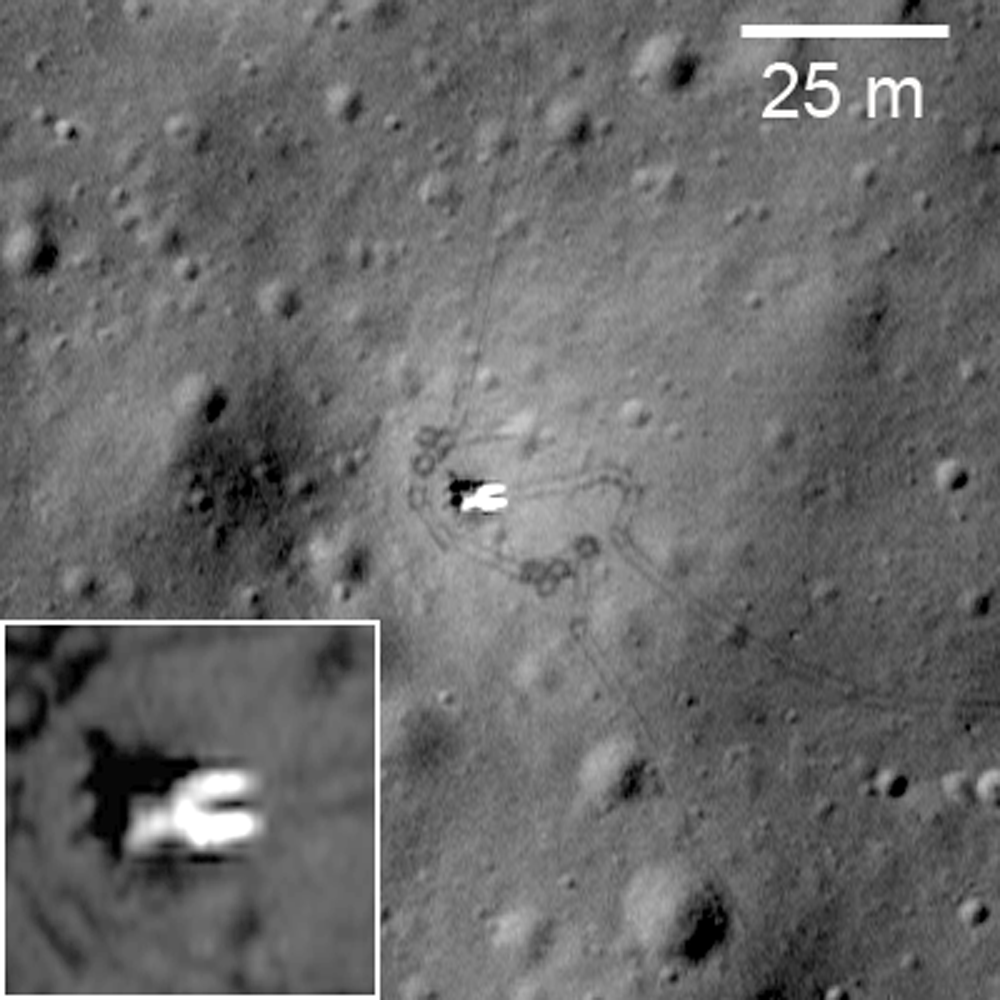
| Perhaps the Chang'e 3 lander and rover will look something like this. Lunokhod 1 rover in its final parking place (38.315°N, 324.992°E) on the surface of Mare Imbrium, 250 km southwest of Laplace A. The Soviet rover, and its French-built laser range reflector array, were lost for four decades until relocated by LRO. The addition of the LLR to astrophysicists on Earth critically improved the accuracy of measurements of the distance to the Moon, bringing the uncertainty to within 3 millimeters. LROC NAC observation M175502049RE, spacecraft orbit 10998, resolution 33 cm per pixel. Original LROC Featured Image, HERE [NASA/GSFC/Arizona State University]. |
Related Posts:
Lunar Laser Ranging: The Millimeter Range (November 19, 2013)
'Government landing penalty' removed from Google Lunar Xprize terms (November 7, 2013)
Chang'e 3 and LADEE: The Role of Serendipity, Paul Spudis (October 31, 2013)












{kind=link}
{kind=link}