
 |
| Yutu, the "Jade Rabbit" lunar rover, as imaged by the Chang'e-3 lander panoramic camera [CNSA/CLEO/CAS]. |
Yong-Chun Zheng, Ph. D
National Astronomical Observatories
Chinese Academy of Sciences
The Chang’E-3 lander is equipped with four instruments, that is, one lunar-based optical telescopes, one extreme ultraviolet cameras, one landing cameras, one topography camera. The Jade rabbit rover is equipped with the four instruments, that is, one ground penetrating radar, one particle excitation X-ray spectrometer, one infrared imaging spectrometer, one panoramic camera. The scientific goals could be summarized into three aspects: monitoring the Earth, observing the sky and detecting the Moon. Except the particle excitation X-ray spectrometer and the infrared imaging spectrometer, the other six instruments had powered on after the landing. The science data were received by the two ground stations in Beijing and Kunming.
During Dec. 14-26, 2013, the Jade rabbit and the lander spent their first lunar day on the lunar surface. Eight sets of scientific instruments were powered on and tested. In the test phase, all of the instruments worked as well as expected. Large amounts of science data had been received. The science team in the Chinese Academy of Sciences carried the data processing and data analysis.
National Astronomical Observatories
Chinese Academy of Sciences
The Chang’E-3 lander is equipped with four instruments, that is, one lunar-based optical telescopes, one extreme ultraviolet cameras, one landing cameras, one topography camera. The Jade rabbit rover is equipped with the four instruments, that is, one ground penetrating radar, one particle excitation X-ray spectrometer, one infrared imaging spectrometer, one panoramic camera. The scientific goals could be summarized into three aspects: monitoring the Earth, observing the sky and detecting the Moon. Except the particle excitation X-ray spectrometer and the infrared imaging spectrometer, the other six instruments had powered on after the landing. The science data were received by the two ground stations in Beijing and Kunming.
During Dec. 14-26, 2013, the Jade rabbit and the lander spent their first lunar day on the lunar surface. Eight sets of scientific instruments were powered on and tested. In the test phase, all of the instruments worked as well as expected. Large amounts of science data had been received. The science team in the Chinese Academy of Sciences carried the data processing and data analysis.
The preliminary results of the rabbit and the lander have been released to the public through the website: http://www.cas.cn/xw/zyxw/yw/201401/t20140111_4021494.shtml
I translated most of the news into English as the followings.
1. Landing cameras
The landing cameras has taken 4673 pictures during the important landing stage of CE-3. These visible images were used to help the selection of the landing sites and to ensure the safe landing of the lander and rabbit. The task of the landing camera has been completed well.
2. The topography camera and the panoramic camera
The topography camera was developed by the Institutes of Optics and Electronics, CAS. The panoramic camera was developed by the Xi'an Institute of Optics and Precision Mechanics (XIOPM), CAS.
I translated most of the news into English as the followings.
1. Landing cameras
The landing cameras has taken 4673 pictures during the important landing stage of CE-3. These visible images were used to help the selection of the landing sites and to ensure the safe landing of the lander and rabbit. The task of the landing camera has been completed well.
2. The topography camera and the panoramic camera
The topography camera was developed by the Institutes of Optics and Electronics, CAS. The panoramic camera was developed by the Xi'an Institute of Optics and Precision Mechanics (XIOPM), CAS.
 |
| Fig. 1. The lunar surface image pictured by the panoramic camera. Pictured at 2154, Dec. 14, 2013 (UT) [CNSA/CLEP/CAS]. |
 |
| Fig. 2. The image of the back of the lander pictured by the panoramic camera. Two tracks in the front side are the railway for the Jade rabbit, from which the rabbit stepped out from the lander. Pictured at 12:44-12:52, Dec. 15, 2013 (UT) [CNSA/CLEP/CAS]. |
 |
| Fig. 3. The image of the front side of the Jade rabbit rover pictured by the topography camera. The rabbit stopped here for moment. It turned round and pictured by the lander. The rover is close to the crater about 15 meters in diameter. There are large boulder in the crater ring. The reflected light luminaire could be observed in the right side. Pictured at 15:41, Dec. 15, 2013 UT [CNSA/CLEP/CAS]. |
 |
| Fig. 4. The image of the side of the lander pictured by the panoramic camera. The rabbit stepped out from the railway in the right side. Pictured at 19:43-19:50, Dec. 15, 2013 (UT) [CNSA/CLEP/CAS]. |
 |
| Fig. 5. The image of the side of the Jade rabbit rover pictured by the topography camera. The rod antenna of the ground penetrating radar are located in the left side. Pictured at 20:57, Dec. 16, 2013 (UT) [CNSA/CLEP/CAS]. |
 |
| Fig. 6. The ringlike image of the surrounding environment of the landing site pictured by the panoramic camera. We can observed the wheel tracks of the rabbit in the top of the image. There are also several craters with diameter about several meters to more than ten meters. Fortunately, the laser range sensor and the laser 3-D imaging sensors on the lander select the safe landing site autonomously to avoid the crater. Pictured in Dec. 17-18, 2013 [CNSA/CLEP/CAS]. |
 |
| Fig. 7. The ringlike image of the surrounding environment of the landing site pictured by the panoramic camera in Dec. 23, 2013. We can observed the wheel tracks of the rabbit in the top [CNSA/CLEP/CAS]. |
 |
| Fig. 8. The image of the lunar surface at the landing site pictured by the topography camera. The landing site have high rock abundance. There are also many small crater impacted by the micrometeorites. Pictured at 15:14, Dec. 17, 2013 (UT) [CNSA/CLEP/CAS]. |
 |
| Fig. 9. The image of the rabbit pictured by the topography camera. The landing site have high rock abundance. There are also many small crater impacted by the micrometeorites. Pictured at 18:48, Dec. 21, 2013 [CNSA/CLEP/CAS]. |
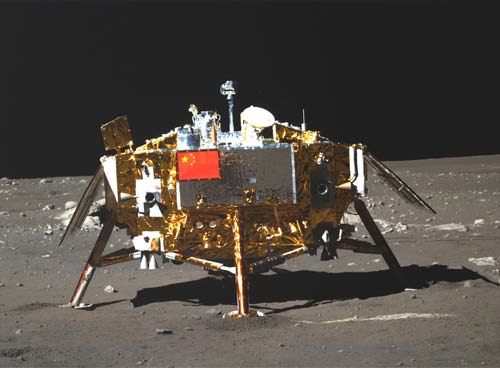 |
| Fig. 10. The front side image of the lander pictured by the panoramic camera at 22:50, Dec. 21, 2013 (UT). We can observed high rock abundance near the landing site. Fortunately, the lander avoided the large boulders to ensure the safe landing [CNSA/CLEP/CAS]. |
 |
| Fig. 11. The earth rised from the horizon of the Moon. This image was pictured by the topography camera on the lander at 18:15, Dec. 22, 2013 (UT) [CNSA/CLEP/CAS]. |
3. The lunar-based optical telescopes
The lunar-based optical telescopes observed the three different patches of the sky in the near ultraviolet band in Dec. 16, 2013. The observed sky is located in the Draco. The celestial coordinate of the star are positioned.
The lunar-based optical telescopes observed the three different patches of the sky in the near ultraviolet band in Dec. 16, 2013. The observed sky is located in the Draco. The celestial coordinate of the star are positioned.
 |
| Fig. 12. The observed 23 stars by the lunar-based optical telescope [CAS]. |
4. The extreme ultraviolet cameras
The extreme ultraviolet cameras: 63 images of the plasmasphere of the Earth are pictured by the extreme ultraviolet cameras in Dec. 16, 2013.
The extreme ultraviolet cameras: 63 images of the plasmasphere of the Earth are pictured by the extreme ultraviolet cameras in Dec. 16, 2013.
 |
| Fig. 13. The observed plasmasphere of the Earth (left) and the simulation results (right) [CAS]. |
The ground penetrating radar: The ground penetrating radar is installed on the rabbit rover. There are two observation channels working at 60MHz and 500MHz. The penetration depth are about 100m and 30m respectively. The subsurface structure of the landing site has been observed.
 |
| Fig. 14. The observation results of the GPR at 60 MHz (left, On the path of the rabbit walking from the location C to E) and 500MHz (right, walking from the location B to E) [CAS]. |
The grey image pictured by the infrared imaging spectrometer.
 |
| Fig. 15. The grey image of the lunar surface pictured by the infrared imaging spectrometer [CNSA/CLEP/CAS]. |
 |
| Fig. 16. The curve of spectrum of the lunar surface at the landing sites. The left figure are the relative reflectivity curve at the VIS-NIR band. The right figure are the relative reflectivity curve at the shortwave infrared band [CAS]. |
7. The particle excitation X-ray spectrometer
 |
| Fig. 17. The particle excitation X-ray spectrometer carried out the calibration test using the boarded basalt sample. The energy spectrum of the calibration tested basalt (left) and the detected lunar soil sample (right). There are eleven elements could be detected from the observed energy spectrum, that is Mg, Al, Si, K, Ca, Ti, Cr, Fe, Sr, Y, Zr [CAS]. |
Statement: The science results of the instruments onboard the CE-3 lander and the Jade rabbit are provided by the scientists team of CE-3 mission.
No comments:
Post a Comment